En cherchant à exprimer des intervalles de confiance pour des coefficients lors d’une régression linéaire multiple, j’ai approché ma statistique de khi-deux (χ²) par une fonction quadratique convexe au voisinage de son minimum. L’ensemble des vecteurs de paramètres en dessous du seuil de khi-deux acceptable est alors un ellipsoïde (ou plus exactement sa généralisation en dimension quelconque) dont je cherche la projection sur chaque axe. Les sections par les sous-espaces engendrés par des axes de coordonnées se traitent par des formules analogues. Ces formules permettent de construire ensuite des algorithmes d’optimisation (de la fonction ou des projections de l’ellipsoïde) sous la contrainte que les vecteurs soient de coordonnées toutes positives.
Projections sur les axes
On considère un ellipsoïde (plein) de centre C pouvant être décrit par une inéquation de la forme (X − C)⊤S(X − C) ≤ z où S est une matrice symétrique définie positive de taille n et z est un réel positif.
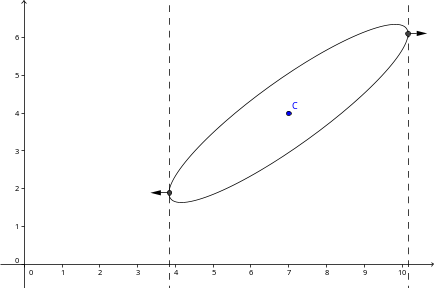
Sa projection sur un axe de coordonnée est un segment dont les extrémités sont obtenues en optimisant la coordonnée Xi sur le bord de l’ellipsoïde. La méthode du multiplicateur de Lagrange montre qu’en un tel point, le gradient de la fonction quadratique f(X) = (X − C)⊤S(X − C) doit être colinéaire au vecteur élémentaire Ei.
Comme ce gradient s’écrit ∇f = 2S(X − C), une condition nécessaire de l’optimisation est l’existence d’un réel λ tel que X = C + λS−1Ei. Un tel point sera dit optimal pour la coordonnée Xi.
Dans ce cas, on trouve f(X) = λ2(S−1)i,i d’où λ = ±√(z(S−1)i,i).
Chaque coordonnée du vecteur X est donc encadrée par les valeurs Xi = Ci ± √(z(S−1)i,i).
Restriction à un sous-espace
Soit A ⊂ ⟦1, n⟧. On note RA le sous-espace engendré par les axes indexés par les éléments de A. Si on cherche à encadrer les composantes d’une restriction de l’ellipsoïde à ce sous-espace on peut introduire la matrice J représentant l’injection canonique de RA dans Rn. On réécrit alors X = JX′ puis on pose S′ = J⊤SJ (matrice symétrique définie positive représentant la restriction de la forme quadratique à F) et C′ = S′−1J⊤SC pour obtenir :
En notant z′ le second membre de cette égalité, on retrouve les expressions X′i = C′i ± √(z′(S′−1)i,i), à condition bien sûr que z′ soit positif, ce qui n’est pas forcément le cas : si z′ < 0, l’ellipsoïde est disjoint du sous-espace RA.
En particulier, si A = {i}, on a S′ = Si,i donc C′ = 1Si,iSiC
Point de coordonnées positives
On s’intéresse maintenant uniquement à la partie de l’ellipsoïde dont les points ont des coordonnées toutes positives, c’est-à-dire son intersection avec l’orthant positif. La première question qui se pose est l’existence d’un point dans cette intersection, et sa détermination.
L’algorithme qui suit est une méthode d’ensemble actif (active set) décrite par exemple par J. Nocedal et S. W. Wright dans Numerical Optimization, §16.5 Active-Set Methods for Convex QPs, Springer 2006. Il est composé d’une alternance de deux phases, que j’appelle restriction et extension, définissant une suite de points de valeur strictement croissante selon f, chacun étant situé au centre d’une restriction de l’ellipsoïde à un sous-espace engendré par des axes de coordonnées. L’ensemble de ces sous-espaces étant fini (indexé par l’ensemble des parties de ⟦1, n⟧), l’algorithme termine nécessairement.
L’initialisation consiste à tester la positivité des coordonnées du centre (ce qui achèverait immédiatement la recherche), sinon on définit un point M0 par projection de ce centre sur l’orthant positif, autrement dit en annulant les coordonnées négatives du centre, et on définit le sous-espace F0 = Rn.
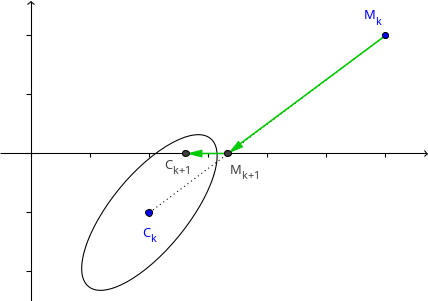
La phase de restriction est une boucle associée à une suite strictement décroissante (pour l’inclusion) de sous-espaces Fn, ce qui assure là encore sa terminaison. À chaque étape, on teste la positivité des coordonnées du centre Cn de la restriction de l’ellipsoïde à Fn. Le cas échéant, la boucle se termine, sinon, on relie le point Mn à ce centre et le nouveau point Mn+1 est le plus avancé sur ce segment qui reste à coordonnées positives. Le nouveau sous-espace Fn+1 est obtenu en annulant les coordonnées qui bloquent l’avancée le long du segment.
Par stricte convexité de la fonction f, ces valeurs décroissent strictement le long de chaque segment [MnCn] en direction du centre et par conséquent le long de la suite des points (Mn).
La phase d’extension consiste à étendre le sous-espace selon une coordonnée négative du gradient. Le centre de la restriction de l’ellipsoïde sur ce nouveau sous-espace est alors nécessairement avec une coordonnée positive dans cette direction, et on peut relancer une phase de restriction.
Lorsque toutes les composantes du gradient sont positives, cela signifie que le point minimise la fonction f sur l’orthant positif, ce qui arrive en temps fini. À chaque étape de calcul, on peut arrêter l’algorithme si la fonction est évaluée en dessous du seuil de définition de l’ellipsoïde. Si à la fin de l’algorithme, la minimisation de la fonction reste au dessus du seuil, c’est que l’ellipsoïde est disjoint de l’orthant positif.
Projections de la partie positive
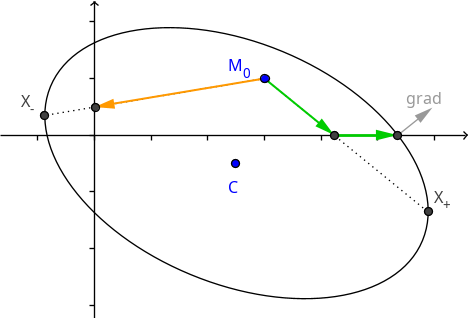
Pour évaluer les projections sur les axes de l’intersection de l’ellipsoïde avec l’orthant positif, on peut appliquer un algorithme analogue au précédent, mais cette fois le point de départ est un point de coordonnées positives dans l’ellipse, et ses successeurs sont construits en direction des points optimaux au lieu de viser les centres.
Par unicité des points optimaux (pour chaque direction d’axe de coordonnée et chaque sens), la coordonnée à optimiser est strictement améliorée à chaque étape d’une phase de restriction. Dans le cas d’une minimisation, il se peut qu’un des points d’étape ait une coordonnée nulle, auquel cas la recherche s’arrête et 0 est bien la valeur minimale à trouver.
Lors de la phase d’extension, une coordonnée à maximiser est toujours associée à une composante positive du gradient, mais une coordonnée à minimiser est associée à une composante négative du gradient (si la minimisation est elle-même différente de 0). On étend l’espace de recherche dans la direction d’une coordonnée négative du gradient à l’exception de la coordonnée à minimiser.
Programmation en Python
Le programme ci-dessus définit une classe Ellipsoide avec les méthodes suivantes :
projections- Bornes des coordonnées des points de l’ellipsoïde
restriction- Crée ou récupère les éléments de la restriction mise en cache
relaxe- Complète les coordonnées manquantes d’un vecteur restreint par des zéros
point_positif- Détermine un point de l’ellipsoïde avec des coordonnées positives en utilisant une méthode d’ensemble actif (active-set)
proj_positives- Bornes des coordonnées des points de l’intersection de l’ellipsoïde avec l’orthant positif
Une même restriction pouvant servir plusieurs fois dans la fonction proj_positives, ses éléments sont enregistrés en un objet de la sous-classe Restriction
dans une table indexée par des chaines de 0 et 1 (codant le masque de l’ensemble actif).
#!/usr/bin/python3# -*- coding: utf-8 -*-import numpyclass Ellipsoide(object):"""Définit un ellipsoïde plein de centre C, de matrice S et de niveau zdont les points M vérifient l’inégalité (M-C)^T S (M-C) ≤ z"""def __init__(self, centre, matrice, niveau):assert niveau >= 0self.C = numpy.array(centre)self.S = numpy.array(matrice)self.Sinv = numpy.linalg.inv(matrice)self.z = niveauself.restrictions = {}def projections(self):"""Bornes des coordonnées des points de l’ellipsoïde"""return [(c-r, c+r) for (c, r) in ((self.C[i], (self.z*self.Sinv[i,i])**0.5)for i in range(self.C.shape[0]))]class Restriction(object):"""Définit les éléments de la restriction de la forme quadratique à l’espaceengendré par les axes correspondant aux éléments de A"""def __init__(self, parent, A):if A:S = numpy.array([[parent.S[j,k] for j in A] for k in A])self.Sinv = numpy.linalg.inv(S)H = numpy.array([parent.SC[k] for k in A])self.C = numpy.linalg.solve(S, H)self.z = parent.z0 + H @ (self.Sinv @ H)self.indices = {k:j for (j, k) in enumerate(A)}else:self.C = numpy.array(0)self.z = parent.z0def optimal(self, i, epsilon):"""Point optimal pour la coordonnée i dans le sens du signe d’epsilon"""j=self.indices[i]return self.C + epsilon*(self.z/self.Sinv[j,j])**0.5*self.Sinv[j,:]def restriction(self, A):"""Crée ou récupère les éléments de la restriction mise en cache"""grille = ["0" for _ in range(self.C.shape[0])]for j in A:grille[j] = "1"key = "".join(grille)if not self.restrictions:self.SC = self.S @ self.Cself.z0 = self.z-self.C @ (self.SC)if key not in self.restrictions:self.restrictions[key] = Ellipsoide.Restriction(self, A)return self.restrictions[key]def relaxe(X, A):"""Complète les coordonnées manquantes (hors de A) par des zéros"""Y = numpy.zeros(self.C.shape[0])for (j,k) in enumerate(A):Y[k] = X[j]return Ydef point_positif(self):"""Détermine un point de l’ellipsoïde avec des coordonnées positivesen utilisant une méthode d’ensemble actif (active-set)"""if numpy.amin(self.C)>=0:return self.CM = numpy.maximum(self.C, 0)V = M-self.Cy = V @ (self.S @ V)if y <= self.z:return Mn = self.C.shape[0]A = [i for i in range(n) if self.C[i]>=0]M = numpy.array([M[j] for j in A])while 1:# phase de restrictionr = self.restriction(A)while numpy.ndim(r.C) and numpy.amin(r.C)<0:t = 1for j in range(M.shape[0]):if r.C[j]<0 and (1-t)*M[j]+t*r.C[j]<0:t = M[j]/(M[j]-C[j])jmin = jM = numpy.maximum((1-t)*M+t*r.C, 0)M[jmin] = 0V = M-r.Cy = V @ (r.S @ V)if y <= r.z:return self.relaxe(M, A)A.pop(jmin)M = numpy.delete(M, jmin)r = self.restriction(A)if r.z >= 0:return self.relaxe(r.C, A)# phase d’extensionG = sum(x * self.S[k,:] for (x,k) in zip(r.C, A)) - self.SCj = 0seuil = 0i0 = j0 = -1for i in range(n):if j<len(A) and A[j]==i:j=j+1elif G[i] < seuil:i0, j0 = i, jseuil = G[i]if k>=0:A.insert(j0,i0)M = numpy.insert(M, j0, 0)else:raise NameError("Pas de point de coordonnées positives")def proj_positives(self, M0=None):"""Bornes des coordonnées des points de l’intersection de l’ellipsoïdeavec l’orthant positif"""resultat = []n=self.C.shape[0]for i in range(n):bornes = []V = (self.z/self.Sinv[i,i])**0.5*self.Sinv[i,:]for epsilon in (-1, 1):X = self.C + epsilon*Vif numpy.amin(X)>=0:bornes.append(X[i])else:if M0 is None:M0 = self.point_positif()M = M0A = list(range(n))recherche = Truewhile recherche:# phase de restrictionwhile numpy.amin(X)<0:t = 1for j in range(M.shape[0]):if X[j] < 0 and (1-t)*M[j]+t*X[j] < 0:t = M[j]/(M[j]-X[j])jmin = jif A[jmin] == i and epsilon==-1:recherche = Falsebornes.append(0)breakM = numpy.maximum((1-t)*M+t*X, 0)A.pop(jmin)M = numpy.delete(M, jmin)X = self.restriction(A).optimal(i, epsilon)# phase d’extensionif recherche:G=sum(x*self.S[k,:] for (x,k) in zip(X, A))-self.SCj=0for k in range(n):if j<len(A) and A[j]==k:j=j+1elif G[k]<0:A.insert(j,k)M = numpy.insert(M, j, 0)X = self.restriction(A).optimal(i, epsilon)breakelse:recherche = Falsebornes.append(X[A.index(i)])resultat.append((bornes[0], bornes[1]))return resultat